Chaque code d'erreur contient des Notes pour afficher les détails de l'erreur, et certaines Notes qui ont des informations complexes nécessitent une explication.
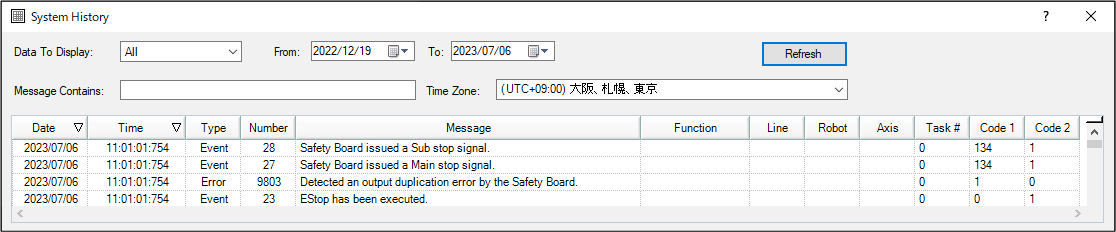
Vous pouvez vérifier la note de chaque code d'erreur dans l'historique du système de l'Epson RC+.
Codes d'erreur 27, 28 : "La carte de sécurité a émis un signal d'arrêt principal." et "La carte de sécurité a émis un signal d'arrêt secondaire."
La Note pour les messages d'erreur "La Carte de sécurité a émis un signal d'arrêt principal" et "La Carte de sécurité a émis un signal d'arrêt secondaire" décrit la raison de l'arrêt par la fonction de sécurité.
Note 1 : Type de signal d'arrêt
Note 2 : détails du signal d'arrêt (la signification diffère en fonction de la Note 1 : type de signal d'arrêt)
Comme les fonctions de sécurité sont surveillées par des circuits redondants indépendants, des erreurs avec les mêmes informations relatives aux notes peuvent être signalées plusieurs fois avec les codes d'erreur 27 (principal) et 28 (secondaire).
Le type de signal d'arrêt de la carte de sécurité et les valeurs actuelles des détails peuvent également être obtenus avec la fonction SF_GetStatus. Pour plus de détails, reportez-vous au manuel suivant :
Epson RC+ 8.0 SPEL+ Language Reference
Pour plus d'informations sur la terminologie relative aux fonctions de sécurité, reportez-vous au manuel suivant :
Safety Function Manual
| Informations relatives aux notes | Aperçu et contre-mesure | |||
|---|---|---|---|---|
| Note 1 (*1) | Note 2 | |||
| Nº | Type de signal d'arrêt | Détails du signal d'arrêt | ||
| 100 | Entrée de sécurité | Nº | Port d'entrée de sécurité | Arrêté en raison d'un arrêt d'urgence ou d'une sécurité affectée à l'entrée de sécurité de la Note 2. Activez le contact NC (contact normalement fermé) de l'interrupteur de sécurité connecté au port d'entrée de sécurité indiqué dans la Note 2. (*6) |
| 1 (*4) | SAFETY_IN1 | |||
| 2 (*5) | SAFETY_IN2 | |||
| 4 | SAFETY_IN3 | |||
| 8 | SAFETY_IN4 | |||
| 16 | SAFETY_IN5 | |||
| 101 | Vitesse limitée de sécurité pour une articulation du robot (SLS_1) | Nº | Nº de l'articulation | Le robot s'est arrêté parce que la vitesse de l'articulation indiquée dans la Note 2 a dépassé la vitesse de sécurité SLS_1. Reportez-vous à la section "Éléments à vérifier lors d'un arrêt causé par la vitesse limitée de sécurité (SLS)" et prenez les contre-mesures adaptées. |
| 1 | J1 | |||
| 2 | J2 | |||
| 4 | J3 | |||
| 8 | J4 | |||
| 16 | J5 | |||
| 32 | J6 | |||
| 102 | Vitesse limitée de sécurité pour une pièce du robot (SLS_1) | Nº | Pièce | Le robot s'est arrêté parce que la vitesse de la pièce indiquée dans la Note 2 a dépassé la vitesse de sécurité SLS_1. Reportez-vous à la section "Éléments à vérifier lors d'un arrêt causé par la vitesse limitée de sécurité (SLS)" et prenez les contre-mesures adaptées. |
| 1 | Extrémité (P1 TCP) | |||
| 2 | Coude (Coude P2) | |||
| 4 | Poignet (Poignet P3) | |||
| 8 | Epaule (Épaule P4) | |||
| 103 | Vitesse limitée de sécurité pour une articulation du robot (SLS_2) | Nº | Nº de l'articulation | Le robot s'est arrêté parce que la vitesse de l'articulation indiquée dans la Note 2 a dépassé la vitesse de sécurité SLS_2. Reportez-vous à la section "Éléments à vérifier lors d'un arrêt causé par la vitesse limitée de sécurité (SLS)" et prenez les contre-mesures adaptées. |
| 1 | J1 | |||
| 2 | J2 | |||
| 4 | J3 | |||
| 8 | J4 | |||
| 16 | J5 | |||
| 32 | J6 | |||
| 104 | Vitesse limitée de sécurité pour une pièce du robot (SLS_2) | Nº | Pièce | Le robot s'est arrêté parce que la vitesse de la pièce indiquée dans la Note 2 a dépassé la vitesse de sécurité SLS_2. Reportez-vous à la section "Éléments à vérifier lors d'un arrêt causé par la vitesse limitée de sécurité (SLS)" et prenez les contre-mesures adaptées. |
| 1 | Extrémité (P1 TCP) | |||
| 2 | Coude (Coude P2) | |||
| 4 | Poignet (Poignet P3) | |||
| 8 | Epaule (Épaule P4) | |||
| 105 | Vitesse limitée de sécurité pour une articulation du robot (SLS_3) | Nº | Nº de l'articulation | Le robot s'est arrêté parce que la vitesse de l'articulation indiquée dans la Note 2 a dépassé la vitesse de sécurité SLS_3. Reportez-vous à la section "Éléments à vérifier lors d'un arrêt causé par la vitesse limitée de sécurité (SLS)" et prenez les contre-mesures adaptées. |
| 1 | J1 | |||
| 2 | J2 | |||
| 4 | J3 | |||
| 8 | J4 | |||
| 16 | J5 | |||
| 32 | J6 | |||
| 106 | Vitesse limitée de sécurité pour une pièce du robot (SLS_3) | Nº | Pièce | Le robot s'est arrêté parce que la vitesse de la pièce indiquée dans la Note 2 a dépassé la vitesse de sécurité SLS_3. Reportez-vous à la section "Éléments à vérifier lors d'un arrêt causé par la vitesse limitée de sécurité (SLS)" et prenez les contre-mesures adaptées. |
| 1 | Extrémité (P1 TCP) | |||
| 2 | Coude (Coude P2) | |||
| 4 | Poignet (Poignet P3) | |||
| 8 | Epaule (Épaule P4) | |||
| 107 | Vitesse limitée de sécurité pour une articulation du robot (SLS_T) | Nº | Nº de l'articulation | Le robot s'est arrêté parce que la vitesse de l'articulation indiquée dans la Note 2 a dépassé la vitesse de sécurité SLS_T en mode TEACH. Réduisez la vitesse de fonctionnement du robot ou vérifiez les paramètres de sécurité associés à SLS_T définie dans le Gestionnaire des fonctions de sécurité. |
| 1 | J1 | |||
| 2 | J2 | |||
| 4 | J3 | |||
| 8 | J4 | |||
| 16 | J5 | |||
| 32 | J6 | |||
| 108 | Vitesse limitée de sécurité pour une pièce du robot (SLS_T) | Nº | Pièce | Le robot s'est arrêté parce que la vitesse de la pièce indiquée dans la Note 2 a dépassé la vitesse de sécurité SLS_T en mode TEACH. Réduisez la vitesse de fonctionnement du robot ou vérifiez les paramètres de sécurité associés à SLS_T définie dans le Gestionnaire des fonctions de sécurité. |
| 1 | Extrémité (P1 TCP) | |||
| 2 | Coude (Coude P2) | |||
| 4 | Poignet (Poignet P3) | |||
| 8 | Epaule (Épaule P4) | |||
| 109 | Vitesse limitée de sécurité pour une articulation du robot (SLS_T2) | Nº | Nº de l'articulation | Le robot s'est arrêté parce que la vitesse de l'articulation indiquée dans la Note 2 a dépassé la vitesse de sécurité SLS_T2 en mode T2. Réduisez la vitesse de fonctionnement du robot ou vérifiez les paramètres de sécurité associés à SLS_T2 dans le Gestionnaire des fonctions de sécurité. |
| 1 | J1 | |||
| 2 | J2 | |||
| 4 | J3 | |||
| 8 | J4 | |||
| 16 | J5 | |||
| 32 | J6 | |||
| 110 | Vitesse limitée de sécurité pour une pièce du robot (SLS_T2) | Nº | Pièce | Le robot s'est arrêté parce que la vitesse de la pièce indiquée dans la Note 2 a dépassé la vitesse de sécurité SLS_T2 en mode T2. Réduisez la vitesse de fonctionnement du robot ou vérifiez les paramètres de sécurité associés à SLS_T2 dans le Gestionnaire des fonctions de sécurité. |
| 1 | Extrémité (P1 TCP) | |||
| 2 | Coude (Coude P2) | |||
| 4 | Poignet (Poignet P3) | |||
| 8 | Epaule (Épaule P4) | |||
| 115 | Position limitée de sécurité (SLP_A) | Nº | Nº de l'articulation, Position surveillée (*2) | Le robot s'est arrêté parce que le numéro d'articulation et la position d'articulation indiqués dans la Note 2 ont interféré avec la position surveillée SLP_A. Reportez-vous à la section "Éléments à vérifier lors d'un arrêt causé par la position limitée de sécurité (SLP)". Réinitialisez ou prenez les contre-mesures adaptées. |
| 1001 (*3) | J2 YL | |||
| 2001 (*3) | J2 YU | |||
| 4001 (*3) | J2 XL | |||
| 8001 (*3) | J2 XU | |||
| 16001 (*3) | J2 ZL | |||
| 32001 (*3) | J2 ZU | |||
| 1002 (*3) | J3 YL | |||
| 2002 (*3) | J3 YU | |||
| 4002 (*3) | J3 XL | |||
| 8002 (*3) | J3 XU | |||
| 16002 (*3) | J3 ZL | |||
| 32002 (*3) | J3 ZU | |||
| 1004 (*3) | J5 YL | |||
| 2004 (*3) | J5 YU | |||
| 4004 (*3) | J5 XL | |||
| 8004 (*3) | J5 XU | |||
| 16004 (*3) | J5 ZL | |||
| 32004 (*3) | J5 ZU | |||
| 1008 (*3) | J6 YL | |||
| 2008 (*3) | J6 YU | |||
| 4008 (*3) | J6 XL | |||
| 8008 (*3) | J6 XU | |||
| 16008 (*3) | J6 ZL | |||
| 32008 (*3) | J6 ZU | |||
| 116 | Position limitée de sécurité (SLP_B) | Nº | Nº de l'articulation, Position surveillée (*2) | Le robot s'est arrêté parce que le numéro d'articulation et la position d'articulation indiqués dans la Note 2 ont interféré avec la position surveillée SLP_B. Reportez-vous à la section "Éléments à vérifier lors d'un arrêt causé par la position limitée de sécurité (SLP)". Réinitialisez ou prenez les contre-mesures adaptées. |
| 1001 (*3) | J2 YL | |||
| 2001 (*3) | J2 YU | |||
| 4001 (*3) | J2 XL | |||
| 8001 (*3) | J2 XU | |||
| 16001 (*3) | J2 ZL | |||
| 32001 (*3) | J2 ZU | |||
| 1002 (*3) | J3 YL | |||
| 2002 (*3) | J3 YU | |||
| 4002 (*3) | J3 XL | |||
| 8002 (*3) | J3 XU | |||
| 16002 (*3) | J3 ZL | |||
| 32002 (*3) | J3 ZU | |||
| 1004 (*3) | J5 YL | |||
| 2004 (*3) | J5 YU | |||
| 4004 (*3) | J5 XL | |||
| 8004 (*3) | J5 XU | |||
| 16004 (*3) | J5 ZL | |||
| 32004 (*3) | J5 ZU | |||
| 1008 (*3) | J6 YL | |||
| 2008 (*3) | J6 YU | |||
| 4008 (*3) | J6 XL | |||
| 8008 (*3) | J6 XU | |||
| 16008 (*3) | J6 ZL | |||
| 32008 (*3) | J6 ZU | |||
| 117 | Position limitée de sécurité (SLP_C) | Nº | Nº de l'articulation, Position surveillée (*2) | Le robot s'est arrêté parce que le numéro d'articulation et la position d'articulation indiqués dans la Note 2 ont interféré avec la position surveillée SLP_C. Reportez-vous à la section "Éléments à vérifier lors d'un arrêt causé par la position limitée de sécurité (SLP)". Réinitialisez ou prenez les contre-mesures adaptées. |
| 1001 (*3) | J2 YL | |||
| 2001 (*3) | J2 YU | |||
| 4001 (*3) | J2 XL | |||
| 8001 (*3) | J2 XU | |||
| 16001 (*3) | J2 ZL | |||
| 32001 (*3) | J2 ZU | |||
| 1002 (*3) | J3 YL | |||
| 2002 (*3) | J3 YU | |||
| 4002 (*3) | J3 XL | |||
| 8002 (*3) | J3 XU | |||
| 16002 (*3) | J3 ZL | |||
| 32002 (*3) | J3 ZU | |||
| 1004 (*3) | J5 YL | |||
| 2004 (*3) | J5 YU | |||
| 4004 (*3) | J5 XL | |||
| 8004 (*3) | J5 XU | |||
| 16004 (*3) | J5 ZL | |||
| 32004 (*3) | J5 ZU | |||
| 1008 (*3) | J6 YL | |||
| 2008 (*3) | J6 YU | |||
| 4008 (*3) | J6 XL | |||
| 8008 (*3) | J6 XU | |||
| 16008 (*3) | J6 ZL | |||
| 32008 (*3) | J6 ZU | |||
| 118 | Limitation d'axe souple | Nº | Nº de l'articulation | Le robot s'est arrêté parce que le numéro d'articulation indiqué dans la Note 2 a dépassé la plage de mouvement de l'articulation au niveau de la limitation d'axe souple. Reportez-vous à la section "Éléments à vérifier lors d'un arrêt causé par la limitation d'axe souple". Réinitialisez ou prenez les contre-mesures adaptées. |
| 1 | J1 | |||
| 2 | J2 | |||
| 4 | J3 | |||
| 8 | J4 | |||
| 16 | J5 | |||
| 32 | J6 | |||
121 | Entrée d'interrupteur | Nº | Nº d'interrupteur | Il s'agit d'informations d'événement notifiées par la carte de sécurité dans les cas suivants. Aucune action n'est requise pour cette notification. Aucune action n'est requise pour cette notification. (*7) Interrupteur d'activation : Interrupteur d'arrêt d'urgence 1 : Ces interrupteurs sont situés sur le pupitre d'apprentissage. Interrupteur d'arrêt d'urgence 2 : Cet interrupteur est connecté au connecteur d'entrée d'arrêt d'urgence du contrôleur. |
| 1 | Activer Interrupteur | |||
| 2 | Arrêt d'urgence Interrupteur 1 | |||
| 4 | Arrêt d'urgence Interrupteur 2 | |||
| 122 | Contrôle de mode | Nº | État | Il s'agit d'informations d'événement qui notifient un changement d'état du contrôle de mode sur la carte de sécurité. Aucune action n'est requise pour cette notification. |
| - | - | |||
| 123 | Surveillance de la décélération | Nº | État | Il s'agit d'informations d'événement qui notifient l'état de la surveillance de la décélération sur la carte de sécurité. Aucune action n'est requise pour cette notification. |
| - | - | |||
| 124 | Surveillance de l'angle de l'articulation | Nº | Nº de l'articulation | Le robot s'est arrêté parce que l'articulation indiquée dans la Note 2 a dépassé la limite d'angle de l'articulation lors de la surveillance de l'angle de l'articulation. 1. Une limite d'angle d'articulation adaptée a-t-elle été définie ? 2. La surveillance de l'angle de l'articulation a-t-elle été activée une fois le robot complètement arrêté ? 3. Une commande d'opération a-t-elle été exécutée lorsque la surveillance de l'angle de l'articulation était désactivée ? 4. Le robot a-t-il été soumis à des vibrations en raison de facteurs externes ? |
| 1 | J1 | |||
| 2 | J2 | |||
| 4 | J3 | |||
| 8 | J4 | |||
| 16 | J5 | |||
| 32 | J6 | |||
Autre que ci-dessus (*1) | Notifie lorsqu'une erreur de la carte de sécurité s'est produite. Reportez-vous à (*1). | |||
*1 : Si la Note 1 n'est pas répertoriée dans le tableau, il s'agit d'informations d'événement lorsque la carte de sécurité émet une notification d'erreur. Aucune action n'est requise pour cette notification. Vous êtes notifié des erreurs liées à cet événement avant et après l'historique du système. Gérez les erreurs de manière appropriée.
Exemple : "Erreur 9803" est notifiée si la Note 1 est "134".
*2 : La correspondance entre les position surveillées X1, X2, Y1, Y2, Z1, Z2 pour la position limitée de sécurité dans le Gestionnaire des fonctions de sécurité et les positions surveillées XL, XU, YL, YU, ZL, ZU décrites dans ce manuel est la suivante :
- Paramètre "Mur" sélectionné en tant que position surveillée : X1 = XL, X2 = XU, Y1 = YL, Y2 = YU, Z1 = ZL, Z2 = ZU
- "Zone réglementée" est sélectionnée tant que position surveillée : X1 = XU, X2 = XL, Y1 = YU, Y2 = YL
Pour plus de détails, reportez-vous au manuel suivant :
"Safety Function Manual du contrôleur de robot Réglage de la position limitée de sécurité (SLP)"
*3 : une chaîne numérique de 4 à 5 chiffres qui indique le numéro d'articulation et la position surveillée.
- 3 derniers chiffres (chiffres 1 à 3) : numéro d'articulation (001 : J2, 002 : J3, 004 : J5, 008 : J6)
- 1 ou 2 chiffres suivants (chiffres 4 à 5) : position surveillée (1: YL, 2: YU, 4: XL, 8: XU, 16: ZL, 32: ZU)
Exemple : Si et la Note 2 est "1002", un signal d'arrêt a été émis parce que le numéro d'articulation J3 (les 3 derniers chiffres sont 002) a dépassé la position surveillée YL (le chiffre suivant est 1).
*4 : As SAFETY_IN1 est réglé sur Arrêt d'urgence (ESTOP) dans les réglages initiaux du contrôleur, connectez un interrupteur d'arrêt d'urgence. Ou modifiez le réglage à l'aide du gestionnaire des fonctions de sécurité.
*5 : Comme SAFETY_IN2 est défini sur Sécurité (SG) dans les paramètres initiaux du contrôleur, connectez une sécurité (barrière de sécurité avec interrupteur de sécurité, etc.). Ou modifiez le réglage à l'aide du gestionnaire des fonctions de sécurité.
*6 : Si le robot s'arrête car l'interrupteur d'arrêt d'urgence connecté au connecteur d'entrée d'arrêt d'urgence du contrôleur ou l'interrupteur d'arrêt d'urgence du pupitre d'apprentissage a été enfoncé, "121" est enregistré dans la Note 1.
*7 : Si le robot s'arrête car l'entrée de sécurité provoque un arrêt d'urgence, "100" est enregistré dans la Note 1.