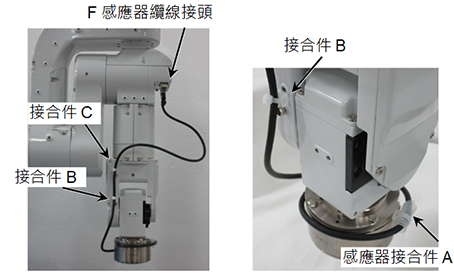
力覺感應器纜線接線
以下為建議的力覺感應器接線範例及機器人的粗略操作範圍。關於實際應用,請根據機器人的使用情況固定接線。
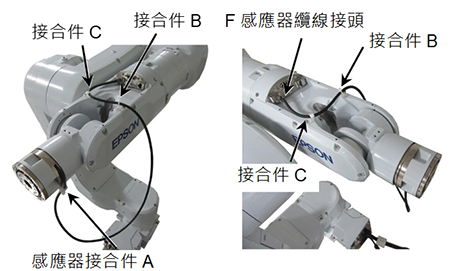
C4系列-S250N
C4系列機器人接線範例
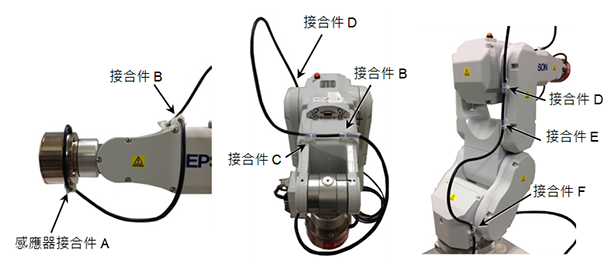
A-B的長度(超過J5及J6的旋轉長度):400 mm
根據機器人的動作,調整C-D及E-F的長度。
C4系列機器人的粗略操作範圍
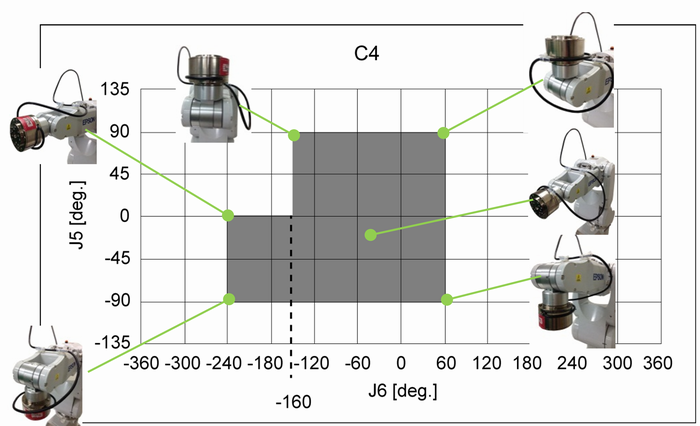
J5 | J6 |
|---|---|
| 0 ~ 90 deg | -160 ~ 60 deg |
| -90 ~ 0 deg | -240 ~ 60 deg |
注意
纜線可能因存放而變形。請務必注意此現象。請確保纜線的彎曲半徑為纜線直徑的5倍以上(R=30 mm以上)。
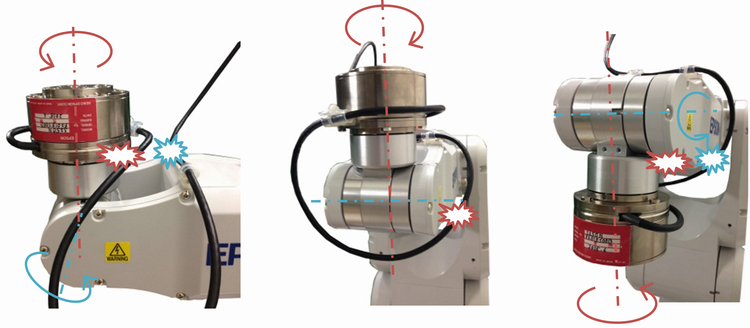
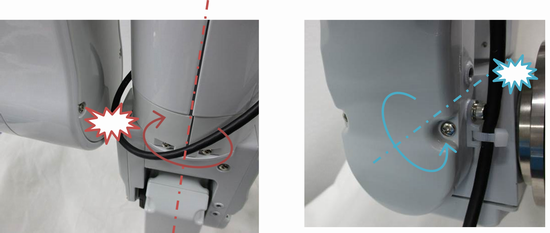
視機器人動作而定,纜線可能會如下圖所示摩擦機器人。
部署纜線時,務必檢查纜線是否碰觸及摩擦機器人。
C8, C12系列-S250L, C8系列-S250P
C8, C12系列機器人接線範例
A-B的長度(超過J5及J6的旋轉長度):475 mm
C8, C12系列機器人的粗略操作範圍
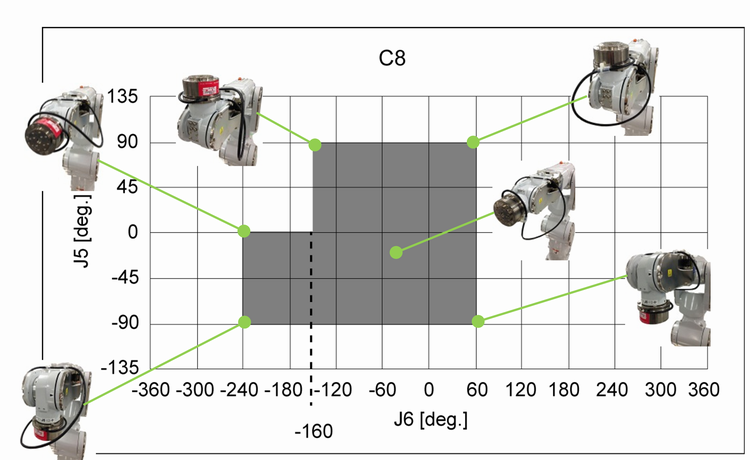
J5 | J6 |
|---|---|
| 0 ~ 90 deg | -160 ~ 60 deg |
| -90 ~ 0 deg | -240 ~ 60 deg |
注意
纜線可能因存放而變形。請務必注意此現象。請確保纜線的彎曲半徑為纜線直徑的5倍以上(R=30 mm以上)。
視機器人動作而定,纜線可能會如下圖所示摩擦機器人。
部署纜線時,務必檢查纜線是否碰觸及摩擦機器人。

N2系列-S250H
N2系列機器人接線範例
A-B的長度(超過J5及J6的旋轉長度):330 mm
以上述範例安裝纜線時,纜線直徑應小於13 mm。
以上述範例接線時,N2系列機器人的動作範圍粗略說明
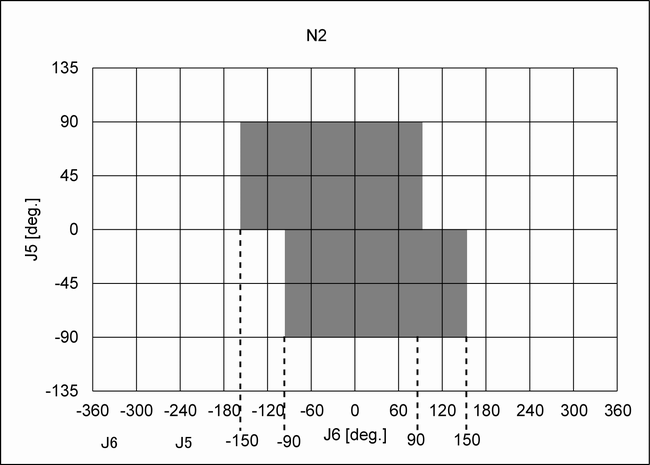
J5 | J6 |
|---|---|
| 0 ~ 90 deg | -150 ~ 90 deg |
| -90 ~ 0 deg | -90 ~ 150 deg |
注意
纜線可能因存放而變形。請務必注意此現象。請確保纜線的彎曲半徑為纜線直徑的5倍以上(R=30 mm以上)。
視機器人動作而定,纜線可能會如下圖所示摩擦機器人。
部署纜線時必須格外小心,且務必檢查纜線是否碰觸及摩擦機器人。
特別注意,若關節#4在機械臂#2及#4互相重疊時旋轉,纜線可能會卡在它們之間。請務必注意此現象。
N6系列-SH250LH
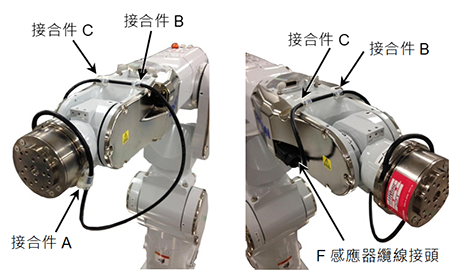
N6系列機器人接線範例
A-B的長度(超過J5及J6的旋轉長度):500 mm
以上述範例安裝纜線時,纜線直徑應小於13 mm。
以上述範例接線時,N6系列機器人的動作範圍粗略說明

J5 | J6 |
|---|---|
| 0 ~ 90 deg | -150 ~ 180 deg |
| -90 ~ 0 deg | -150 ~ 90 deg |
注意
纜線可能因存放而變形。請務必注意此現象。請確保纜線的彎曲半徑為纜線直徑的5倍以上(R=30 mm以上)。
視機器人動作而定,纜線可能會如下圖所示摩擦機器人。
部署纜線時,務必檢查纜線是否碰觸及摩擦機器人。
特別注意,若關節在機械臂及互相重疊時旋轉,纜線可能會卡在它們之間。請務必注意此現象。
將纜線穿過中央孔洞時,纜線重量可能會影響感應器值。部署纜線時,請注意固定位置。
若纜線重量對操作造成影響,請參閱此節的接線範例並固定纜線。
G, GX系列-S2503, S2506, S25010
接線範例1:使用D-sub時
G6, G10, G20, GX8, GX10 與 GX20系列採用使用者接頭D-sub(9針腳)以安裝力覺感應器。

接線範例2:使用纜線導管、外接線選配等
如為G3與GX4系列,使用纜線導管將纜線安裝在機器人外側。
在機器人外側安裝纜線時,務必確認將繼電器纜線的接地線安裝至機器人上的指定位置。

如為G6, G10, G20, GX8, GX10 與 GX20系列,下列選配可使用外接線。
選配產品 | 代碼 | ||
|---|---|---|---|
外部接線 單元 | G6-***S | 適用於臺架式安裝/標準機型 | R12NZ900GX |
| GX8-***S | 適用於臺架式安裝/標準機型 | R12NZ901BY | |
| G6-***S | 適用於天吊式/壁掛式安裝/標準機型 | R12NZ900GY | |
| GX8-***SR/SW | 適用於天吊式/壁掛式安裝/標準機型 | R12NZ901BZ | |
| G10/G20-***S | 適用於臺架式安裝/標準機型 | R12NZ900GZ | |
| GX10/GX20-B***S | |||
| G10/G20-***SR/SW | 適用於天吊式/壁掛式安裝/標準機型 | R12B031912 | |
| GX10/GX20-B***SR/SW | |||
| 繼電器纜線 | R12NZ900RW | ||

接線範例1及2使用隨附的纜線安裝架及束線帶來固定下列接合件A及B。如使用其他零件,請根據機器人的動作固定纜線。

注意
纜線可能因存放而變形。請務必注意此現象。請確保纜線的彎曲半徑為纜線直徑的5倍以上(R=30 mm以上)。
視機器人動作而定,纜線可能會如下圖所示摩擦機器人或受到張力。
部署纜線時,請注意此部分,並檢查纜線是否碰觸及摩擦機器人或受到張力。

RS系列-S2503
RS系列採用使用者接頭D-sub(15針腳)以安裝力覺感應器。使用隨附的分支纜線連接使用者接頭及力覺感應器纜線。分支纜線可將使用者接頭D-sub(15針腳)分為6針腳及9針腳。

使用隨附的束線帶及纜線安裝架固定接合件A及B。如使用其他零件,請根據機器人動作固定纜線。
A-B的長度(超過J4的旋轉長度):350 mm

以上述範例安裝纜線時,請使用下列範圍將機器人動作設定為粗略引導。
| J4 |
|---|
| + 180 deg. |
| - 180 deg |
在使用者接頭D-sub(15針腳)中,將分支為6針腳的分支纜線用於力覺感應器。若要使用剩下的9針腳,請參閱下圖。

注意
- 纜線可能因存放而變形。請務必注意此現象。請確保纜線的彎曲半徑為纜線直徑的5倍以上(R=30 mm以上)。
- 視機器人動作而定,纜線可能會如下圖所示摩擦機器人。部署纜線時,務必檢查纜線是否碰觸及摩擦機器人。
