Property setting guidelines for the ContactProbe object
Step 1. Set basic information
Set properties (Name, Description, Enabled, StepID, AbortSeqOnFail) related to the basic information.
Properties | Description, setting guide |
|---|---|
| Name | Name of the force guide object. Set a particular name. |
| Description | Description for the force guide object. Describe the operations. Set a character string. |
| Enabled | Set whether to execute the force guide object. |
| True : Normal | |
| False : When you do not execute the force guide object (e.g., when you execute another force guide object instead). | |
| StepID | StepID during the force guide object execution. Set an ID. StepID is an ID which is recorded in the log data. It helps you to understand which log data support a process. It is applied when AutoStepID of the force guide sequence is False. |
| AbortSeqOnFail | Set whether to abort or continue the force guide sequence when the force guide object fails. |
True : Normal End a force guide sequence. | |
| False : Cases where the force guide sequence contains recovery operations in case of failure; cases where the sequence will be able to continue even in the event of a failure. |
Step 2. Set I/O processing before starting
Set properties (IOPreprocEnabled, IOPreprocOutputBit, IOPreprocOutputStatus) related to I/O processing before starting force guide object.
Properties | Description, setting guide |
|---|---|
| IOPreprocEnabled | Set whether to operate the output bit when starting the force guide object. You can operate only one output bit. To operate several output bit, use SPELFunc object. |
| False : Normal | |
| True : You operate the output bit, as when you use or stop a peripheral device. | |
| IOPreprocOutputBit | Set the output bit which is operated when the force guide object starts. |
| IOPreprocOutputStatus | Set whether to turn the output bit ON or OFF when the force guide object starts. Set the state to be output. |
Step 3. Set a probe motion
Set properties (ProbeTrajectory, ProbeDetectType, AccelS, SpeedS, SpiralDiam, SpiralPitch, DestRelativeX, DestRelativeY, DestRelativeZ) related to the probe motion.
Properties | Description, setting guide |
|---|---|
| ProbeTrajectory | Set a trajectory to probe. You can select from the spiral trajectory and the straight-line trajectory. Straight : When it is clear that the target is on the specified straight line. Spiral : When the target is not on the specified straight line. The ContactProbe object takes more time than the PressProbe object. When a hole is on the specified straight line, reduce the positional difference of the start position. We recommend using Straight. |
| AccelS | Set the translational acceleration of the movement. As shown below, use this property for a motion which is moving to the next contact position when there is no hole and the robot contact with the object. This motion does not execute the force control functions. The robot moves with the position control.
It does not affect to the acceleration during the contact motion. |
| SpeedS | Set the translational velocity of the movement. As with AccelS, this property is used for a motion that moves to the next contact motion. It does not affect to the speed during the contact motion. |
SpiralDiam SpiralPitch | Set a diameter and pitch of the spiral trajectory.
|
SpiralDiam : Set a value which is the maximum value of the distance from the start point to the detection target (positional variations are included) plus an added margin. Example: Value: 1.1 times larger than the maximum value | |
SpiralPitch : Set a value which does not pass through the detection target. When detecting a hole, set a smaller value than the minimum interval between the holes. | |
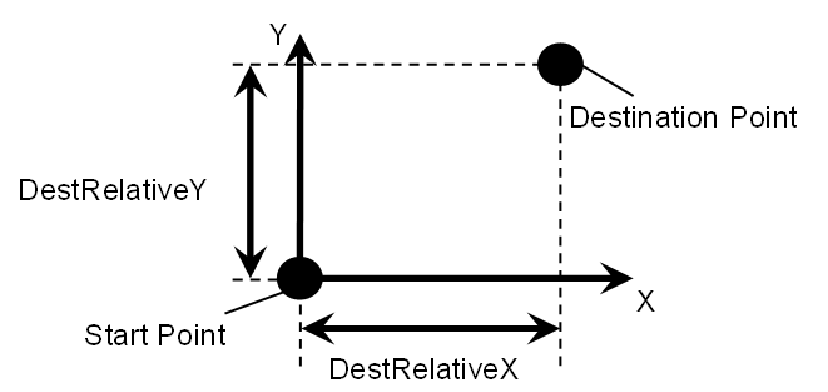
DestRelativeX DestRelativeY DestRelativeZ | Set a relative movement amount to each direction from the start point of the force guide object to the destination point. As shown below, set the movement amount in the coordinate system specified by ForceOrient of the force guide sequence.
|

Step 4. Set the contact motion and force control functions
Set properties (ContactInterval, ContactOrient, ContactDist, ContactDistMargin, ContactFirmnessF, CFEnabled) related to the contact motion and force control functions.
Properties | Description, setting guide |
|---|---|
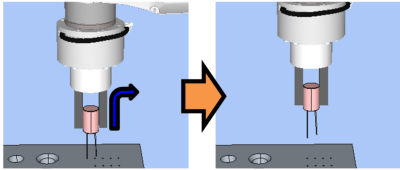
| ContactInterval | Set an interval of the contact motions. As shown below, the robot probes the trajectory from the start point of the ContactProbe object to the destination point based on the start point. Next contact motion starts where the robot moves the distance specified by ContactInterval.
ContactProbe object performs the contact motion at the contact motion start points where are between the start point and the destination point. When the destination point is not a multiple of ContactInterval: Contact motion is not executed in the destination point and the next contact motion start point that exceeds the destination point. Be sure to set ContactInterval not pass through the detection target. Set the smaller value than the minimum interval. However, it takes time with the small value. Please perform proper adjustments for your operations. |
| ContactOrient | Set a direction to contact. The robot moves to the specified direction. |
ContactDist ContactDistMargin | This property sets a distance from the start point to the target contact point and its margin. ContactProbe object determines as "there is a hole" when the robot moves ContactDist+ContactDistMargin in the direction specified by ContactOrient.
As shown above, set a distance from the workpiece tip to the contact plane of the target in ContactDist. ContactDistMargin sets a margin including the variations of the start point and the workpiece. If the variations are not clear, calculate by percentage of the ContactDist. Example: 10% of ContactDist |
| ContactFirmnessF | Set a firmness of the force control functions. When setting a large value: The Force Control functions become stronger, but response to changes in force is slow. When setting a small value: The Force Control function will become weaker. Response to changes in force is fast; however, vibrations can easily occur. ContactProbe object affects to the contact speed. Reference value of the contact speed can be calculated by (ContactForceThresh / ContactFirmnessF). |
| CFEnabled | Set whether to continue the force control functions to the next force guide object. False : Normal Turn OFF the force control functions once, then execute the next force guide object. |


You can check the settings of ContactOrient by a simulator. A coordinate system with grayed out except the specified direction is displayed.
However, the robot is displayed based on the current position. When you check the settings, make sure to move the robot to the position where executing the force guide object.
For details on how to check by using simulator, refer to the following manual.
"Epson RC+ 8.0 User's Guide: - Simulator - Description of Functions"
Step 5. Set the end conditions
Set properties (ContactForceThresh, PosCheckType, PlaneNumber, PlaneEndCond, Timeout) related to the end conditions.
Properties | Description, setting guide |
|---|---|
| ContactForceThresh | Set a threshold to determine a contact. Set to approximately 3 to 5[N]. Be sure to set a proper threshold for your workpiece. |
When ContactOrient is in a positive direction: Set a negative value. When ContactOrient is in a negative direction:: Set a positive value. | |
When setting a large absolute value: Movement speed until the robot makes contact will be fast. When the value is too small: Robot may not move. | |
| PosCheckType | Select types of the end conditions related to positions. |
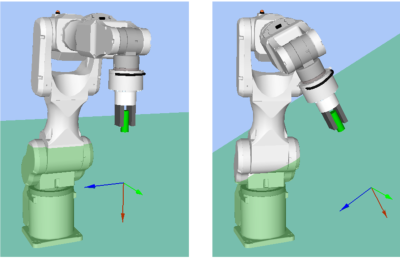
When selecting RobotPlane: End conditions are based on the set Plane. As shown below, use this property for setting the end conditions based on a defined position regardless of the position of the robot.
| |
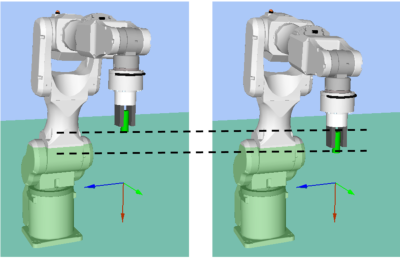
When selecting RelativePlane: Every time the force guide sequence is executed, create Plane at a position moved by ContactDist+ContactDistMargin in the direction specified by ContactOrient, and set as an end condition of position. As shown below, use this property for changing the end condition positions depending on the position at the start.
| |
RobotPlane : when always based on a defined position RelativePlane : when making it a condition that the robot moves a relative distance from the start position. | |
| PlaneNumber | Set Plane number which is used for an end condition of positions. |
When PosCheckType is RobotPlane: End conditions based on the specified Plane number are set. | |
When PosCheckType is RelativePlane: Every time the force guide sequence is executed, set Plane to the specified number. | |
| Set an empty Plane number. | |
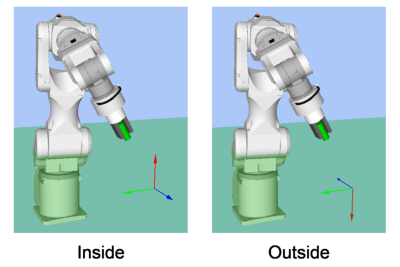
| PlaneEndCond | Set the state of the end condition of positions. Set either Inside (inside the Plane) or Outside (outside of the Plane) as an end condition. When the robot will be the specified state, it is determined as the end conditions of the positions are satisfied. Inside the plane: It is in +Z direction of Plane.
|
| Timeout | Set a time-out period of a contact motion. Satisfy the force or position conditions in the specified time. Make sure that the value is larger than a value calculated by (ContactDist + ContactDistMargin) / (ContactForceThresh / ContactFirmnessF). |