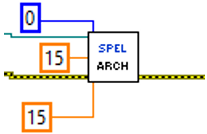
Arch VI
Tool Palette
Epson Robots 8.0 | Robot Settings
Description
Defines ARCH parameters (Z height to move before beginning horizontal motion) for use with the JUMP instructions.
Inputs
| Spel Ref In | Spel reference from a previous Spel Ref Out. |
| Error In | Error condition from a previous Spel node. |
| Arch Number | The depart distance in millimeters moved at the beginning of the Jump instruction before starting horizontal motion. |
| Depart Dist | The depart distance in millimeters moved at the beginning of the Jump instruction before starting horizontal motion. |
| Appro Dist | The approach distance in millimeters above the target position of the Jump instruction. |
Outputs
| Spel Ref Out | Spel reference output for next VI to use. |
| Error Out | Error condition output for subsequent Spel nodes. |
Remarks
If an error occurs and the ErrorNumber property of the SpelException is 3101, see the comments in the SetPoint VI.
See Also
Jump VI, Jump3 VI, SetPoint VI
Arch Example