FollowMove对象的属性设置准则
Step 1. 设定基本信息
设定与基本信息相关的属性(Name, Description, Enabled, StepID, AbortSeqOnFail)。
属性 | 说明、设置指南 |
|---|---|
| Name | 设置力觉向导对象的名称。 设置唯一的名称。 |
| Description | 设置力觉向导对象的描述。 可描述动作的相关说明。可设置为任意文字。 |
| Enabled | 设置是否执行力觉向导对象。 |
| True:正常 | |
| False:力觉向导,例如执行了另一个力觉向导对象时 | |
| StepID | 力觉向导对象执行过程中的StepID。 可设置为任意ID。 StepID是记录在日志数据中的ID。可以方便理解日志数据对应哪个进程。 当力觉向导序列的AutoStepID设置为False时可用。 |
| AbortSeqOnFail | 设置当力觉向导对象失败时,终止或继续执行力觉向导序列。 |
True:正常 结束力觉向导序列。 | |
| False:失败的力觉向导序列中包含恢复动作时,以及力觉向导序列即使失败也可以继续运行时 |
Step 2. 设置启动前的I/O处理
在启动力觉向导对象之前,设置与I/O处理相关的属性(IOPreprocEnabled, IOPreprocOutputBit, IOPreprocOutputStatus)。
属性 | 说明、设置指南 |
|---|---|
| IOPreprocEnabled | 设定启动力觉向导对象时是否操作输出位。 您只能操作一个输出位。要操作多个输出位,请使用SPELFunc对象。 |
| False : 正常 | |
| True : 操作输出位,例如操作/中止外围设备时 | |
| IOPreprocOutputBit | 设置力觉向导对象启动时操作的输出位。 |
| IOPreprocOutputStatus | 启动力觉向导对象时,设置是打开还是关闭输出位。 设定要输出的状态。 |
Step 3. 设定移动动作
设定与移动相关的属性(MotionTrajectory, AccelS, AccelR, SpeedS, SpeedR, CPEnabled)。
属性 | 说明、设置指南 |
|---|---|
| MotionTrajectory | 设定要移动的轨迹类型。 |
| Straight :直线运动时 | |
| Arc :曲线运动时 | |
| MultiStraight :在多个点上连续直线运动时 | |
| MultiStraightCP:在多个点上连接轨道的同时连续直线运动时 | |
AccelS AccelR | 设定移动的加速度。 |
| AccelS:平移加速度 | |
| AccelR:旋转加速度 | |
| 实际加速度由力控制功能调整。 | |
SpeedS SpeedR | 设定移动的速度。 |
| SpeedS:平移速度 | |
| SpeedR:旋转速度 | |
| 实际速度由力控制功能调整。 | |
| SpeedRPriority | 设置SpeedR属性在移动时是否优先。 如果点之间的姿态变化相对于移动距离较大时,使用SpeedS属性动作可能会导致加速度错误。 AutoDistOrientRatio根据点之间的距离和姿态的变化自动确定是否使用SpeedR属性。建议您使用AutoDistOrientRatio。 固定SpeedS属性或SPeedR属性时,请选择Disabled或Enabled。 |
| Disabled:始终使用SpeedS属性时 | |
| Enabled:始终使用SpeedR属性时 | |
| CPEnabled | 设定是否通过路径动作将FollowMove对象的轨迹与下一个力觉向导对象的轨迹相连接。 |
| True : 连接复杂轨迹以便由多个FollowMove对象执行操作时 |
Step 4. 设置目标位置
设定与要移动的轨迹相关的属性(DestType, DestPoint, MidPoint, RelativeOrient, RelativeRobotLocal, DestRelativeX, …, DestRelativeW, MidRelativeX, …, MidRelativeW)。
属性 | 说明、设置指南 |
|---|---|
| DestType | 此属性可以设定如何设定目标点。 如果使用力控制功能,机器人的位置会根据力进行调整。因此,我们建议通过距离定位点的相对移动量来指定目标点。 RobotPoint : 移动到指定点时 Relative : 指定相对移动量时 |
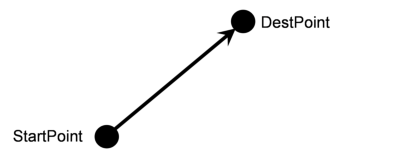
| DestPoint | 设定一个指示目标点(DestPoint)的点。 在MotionTrajectory中选择Straight时: 如下图中所示,机器人将沿直线从力觉向导对象的起点移动到DestPoint。
|
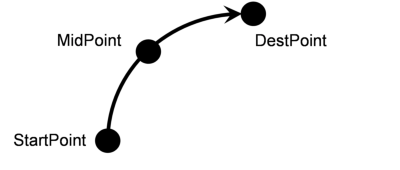
| MidPoint | 当MotionTrajectory为Arc时,设定一个点来表示中点(MidPoint)。 如下图中所示,机器人将在越过MidPoint之后移动到DestPoint。
|
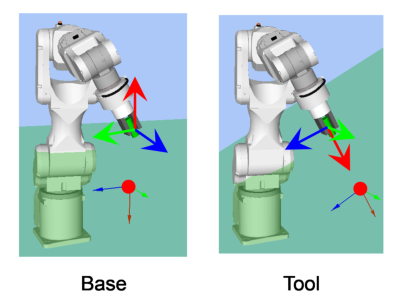
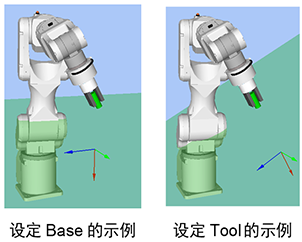
| RelativeOrient | 设定坐标系方向,该方向将作为相对移动的参照。 |
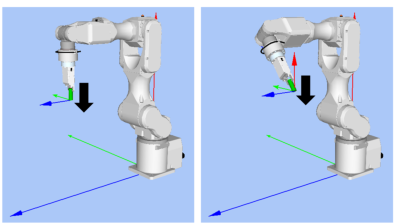
指定Base或Local时: 从外部看,机器人总是按定义的方向操作。 以下是设定Base的示例。朝-Z方向移动时,即使机器人手指的方向已改变,机器人也始终垂直向下(基础坐标系中的-Z方向)移动。(黑色箭头是机器人的动作方向。) 如果希望机器人朝基础坐标系中的不同方向移动,请在本地坐标系中指定。
| |
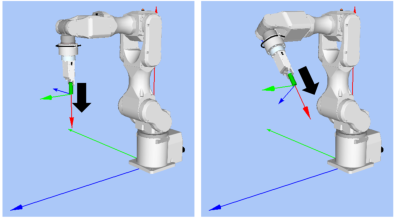
指定Tool时: 移动方向会随着开始时的方向而改变。 以下是设定Tool的示例。朝+Z方向移动时,移动方向会根据机器人手指在开始时的方向而改变。
| |
Base, Local: 即使机器人方向在力觉向导对象启动时已改变,也朝已定义的方向(从外部的角度)移动。 | |
Tool: 根据机器人的方向朝某个方向移动。 | |
| RelativeRobotLocal | 设置一个本地坐标系号,当在RelativeOrient中指定本地坐标系时使用该坐标系号。 |
DestRelativeX DestRelativeY DestRelativeZ DestRelativeU DestRelativeV DestRelativeW | 设置每个方向从力觉向导对象的起点到目标点的相对移动量。 如下图中所示,设定坐标系中由RelativeOrient指定的每个方向的相对移动量。
|
MidRelativeX MidRelativeY MidRelativeZ MidRelativeU MidRelativeV MidRelativeW | 设置每个方向从力觉向导对象的起点到中点的相对移动量。
|
| 如下图中所示,设定坐标系中由RelativeOrient指定的每个方向的相对移动量。 | |
StartPoint EndPoint | 当MotionTrajectory为MultiStraight或MultiStraighCP时,设置指定力觉向导对象的,连续动作开始位置和结束位置的点。 如下图所示,当P1设置为StartPoint,P3设置为EndPoint时,会连续依次通过P1, P2, P3的点。
|



Step 5 设置力控制功能
设定与力控制功能相关的属性(Fx_ControlMode, …, Tz_ControlMode, Fx_Firmness, …, Tz_Firmness, CFEnabled)。
属性 | 说明、设置指南 |
|---|---|
Fx_ControlMode Fy_ControlMode Fz_ControlMode Tx_ControlMode Ty_ControlMode Tz_ControlMode | 设定每个方向的力控制功能的模式。 |
指定Follow时: 通过力控制功能执行跟随动作。 | |
指定Disabled时: 力控制功能被禁用。 | |
在要跟随的方向,将该方向的ControlMode设定为Follow。 您需要为多个方向设定Follow。 | |
| Fx_Firmness Fy_Firmness Fz_Firmness Tx_Firmness Ty_Firmness Tz_Firmness | 设定每个方向的力控制功能的硬度。 |
设定一个较大值时: 强度越大,反应越慢。 | |
设定一个较小值时: 强度越小,反应越快,但可能会产生振动。 | |
| CFEnabled | 设定是否继续对下一个力觉向导对象实施力控制功能。 |
False : 正常 先关闭力控制功能一次,然后执行下一个力觉向导对象。 | |
True : 如果要在机器人与物体接触后开始下一个力觉向导对象并使力保持恒定 下一个力觉向导对象必须在各ControlMode中选择Follow的方向上保持力控制。 |
您可以通过模拟器检查ControlMode的设定。系统将显示一个坐标系,其中除启用方向外均灰显。然而,机器人是基于当前位置显示的。检查设定时,确保将机器人移动到执行力觉向导对象的位置。有关如何使用模拟器进行检查的详细信息,请参阅以下手册。
"Epson RC+ 8.0 用户指南 - 仿真器 - 功能描述"
Step 6 设置结束条件的基本信息
设置与结束条件组合相关的属性(EndCheckOperator)。
属性 | 说明、设置指南 |
|---|---|
| EndCheckOperator | 此属性设定如何组合与位置和I/O相关的结束条件。 AND : 当这两个条件均满足时结束 OR : 在满足一个或多个条件时结束 |
Step 7. 设置与位置相关的结束条件
设定与位置相关的结束条件的属性(PosCheckEnabled, PosCheckType, PlaneNumber, PlaneEndCond, PlaneRelativeOrg, PlaneRelativeX, PlaneRelativeY, PlaneRelativeZ, PlaneRelativeOrient, PlaneAxes, PlaneRelativeRobotLocal)。
属性 | 说明、设置指南 |
|---|---|
| PosCheckEnabled | 此属性设定是否启用与位置相关的结束条件。 True : 启用与位置相关的结束条件时 False : 禁用与位置相关的结束条件时 |
| PosCheckType | 选择与位置相关的结束条件的类型。 |
选择RobotPlane时: 结束条件基于设置的平面。 如下所示,使用此属性可以设定基于定义的位置的结束条件,而不管机器人的位置如何。
| |
选择RelativePlane时: 每次执行力觉向导序列时,在当前位置的一个相对位置创建平面,并将其设置为与位置相关的结束条件。 如下所示,使用此属性可根据开始时的位置更改结束条件位置。
| |
| PlaneNumber | 设定用于与位置相关的结束条件的Plane编号。 |
PosCheckType是RobotPlane时: 设置基于指定Plane编号的结束条件。 | |
PosCheckType是RelativePlane时: 每次执行力觉向导序列时,将平面设置为新指定的编号。 设置一个空的Plane编号。 | |
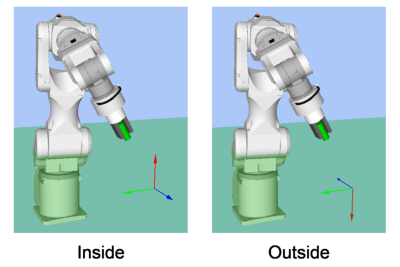
| PlaneEndCond | 设定与位置相关的结束条件的状态。 将平面内(Inside)或平面外(Outside)设定为结束条件。 当机器人处于指定状态时,认定满足与位置相关的结束条件。 Inside: 它在平面的+Z方向。
|
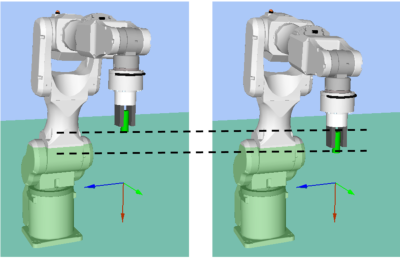
| PlaneRelativeOrg | 设定在表示距平面原点的偏移量时,将哪个坐标系方向用作参照。 |
以下左图是设定Base的示例。 指定一个基于基础坐标系的相对距离。 此示例在PlaneRelativeZ中设定了负值。 以下右图是设定Tool的示例。 指定一个基于工具坐标系的相对距离。 此示例在PlaneRelativeZ中设定了正值。 | |
本地坐标系或工具坐标系仅在该方向上使用,不影响原点位置。
要在机器人动作方向上设置结束条件的位置,通常设置与力觉向导序列的ForceOrient相同的值。 | |
PlaneRelativeX PlaneRelativeY PlaneRelativeZ | 设定当前位置在每个方向相对于平面原点的偏移量。 方向将是PlaneRelativeOrg指定的坐标系方向。 |
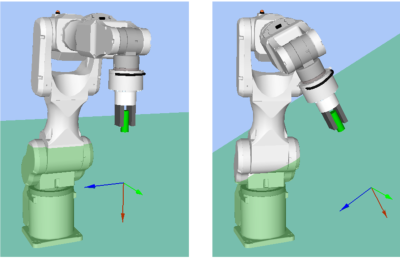
| PlaneRelativeOrient | 设定一个基于平面方向的坐标系。 |
以下左图是设定Base的示例。 平面的参阅方向与Base坐标系匹配,而与力觉向导对象启动时的机器人方向无关。 以下右图是设定Tool的示例。 平面的参阅方向随着力觉向导对象启动时机器人的方向而变化。
| |
| 因为垂直于机器人动作方向的平面将是结束条件,所以通常设置与力觉向导序列的ForceOrient相同的值。 | |
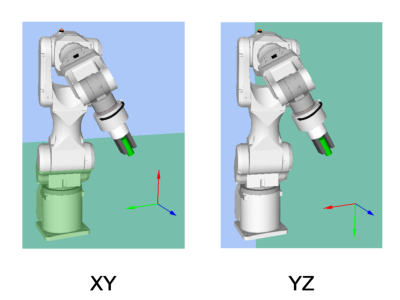
| PlaneAxes | 设定平面方向 根据PlaneRelativeOrient指定的坐标系,平面被设定为由PlaneAxes设定的方向。 下图是PlannerRelationeOrient设定Base时的一个示例。 左图:PlaneAxes指定的XY,右图:PlaneAxes指定的YZ。
|
| 通常,设置垂直于机器人动作方向的平面。 | |
| PlaneRelativeRobotLocal | 设定当PlaneRelativeOrg或PlaneRelativeOrient为Local时使用的本地坐标系编号。 通常,设定一个与力觉向导序列的RobotLocal相同的值。 |
Step 8. 设定与I/O相关的结束条件
设定与I/O结束条件相关的属性(IOCheckEnabled, IOCheckInputBit, IOCheckInputStatus)。
属性 | 说明、设置指南 |
|---|---|
| IOCheckEnabled | 此属性设定是否启用与I/O相关的结束条件。 True : 启用与I/O相关的结束条件时 |
| IOCheckInputBit | 设定作为结束条件监视的输入位。 |
| IOCheckInputStatus | 设定作为结束条件的输入位状态。 如果IOCheckInputBit指定的输入位将是IOCheckInputStatus指定的状态,则认定满足结束条件。 |