Relax物件
Relax物件會將機器人移動至指定方向的力為「0」的位置。
此物件可用於在Press物件按壓後安全釋放按壓狀態,或移除組裝期間額外施加的力。此外,此物件與末端夾具動作結合後,可執行跟隨及抓取。即使工件的尺寸或抓取位置有誤差範圍,機器人可在不額外施加力的情況下穩定抓取工件。
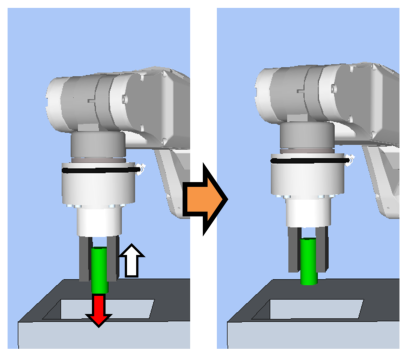
上圖為Relax物件動作的示意圖。機器人會從紅色箭頭狀態(機器人與物件接觸後按壓)往白色箭頭方向移動,使施加的力為「0」。
若在指定時間內滿足結束條件,Relax物件將執行成功。Relax物件可使用與力及I/O相關的結束條件。
每個結束條件皆可設定是否在ForceCheckEnabled或IOCheckEnabled中使用。若未設定結束條件,物件一律將執行成功。設定多個結束條件時,您可選擇如何結合EndCheckOperator中的AND或OR結束條件。
各條件如下:
結束條件 | 成功條件 |
|---|---|
| 力相關結束條件 | 在Timeout的指定時間內,請在HoldTimeThresh指定的時間內持續滿足以下兩條件。 |
ControlMode針對Follow指定的Fx、Fy或Fz軸: 軸應在±FollowCheckTolF的範圍內 | |
ControlMode針對Follow指定的Tx、Ty或Tz軸: 軸應在±FollowCheckTolT的範圍內 | |
| I/O相關結束條件 | Timeout指定時間內,IOCheckInputBit指定的輸入位元應為IOCheckInputStatus指定的狀態。 |