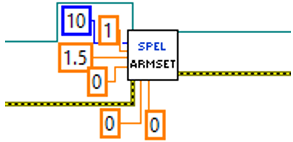
Armset VI
工具面板
Epson Robots 8.0 | Robot Settings
描述
Defines an auxiliary robot arm.
輸入
| Spel Ref In | 來自上一個Spel Ref Out的Spel參考。 |
| Error In | 來自上一個Spel節點的錯誤條件。 |
| ArmNumber | 整數:有效範圍介於1-15。 |
| Param1 | (SCARA機器人適用)肘部中心線到新方向軸中心線的水平距離。(亦即新輔助手臂方向軸中心線所在的位置。)(Cartesian機器人適用)原始X位置的X軸方向位置偏移(公釐)。 |
| Param2 | (SCARA機器人適用)從標準肘部中心線與標準方向軸中心線所形成的直線,到新輔助手臂肘部中心線與新方向軸中心線所形成的直線,兩者之間的偏移(度)。(這兩條直線應該在肘部中心線相交,形成的角度即為Param2。)(Cartesian機器人適用)原始Y位置的Y軸方向位置偏移(公釐)。 |
| Param3 | (SCARA & Cartesian機器人適用)新方向軸中心與舊方向軸中心之間的Z高度偏移差距。(此為距離。) |
| Param4 | (SCARA機器人適用)肩部中心線到新輔助軸肘部方向之肘部中心線的距離。(Cartesian機器人適用)此為虛擬參數(指定0) |
| Param5 | (SCARA & Cartesian機器人適用)新方向軸與舊方向軸的角度偏移(度)。 |
輸出
| Spel Ref Out | 下一個要使用的VI的Spel參考輸出。 |
| Error Out | 後續Spel節點的錯誤條件輸出。 |
備註
如果發生錯誤,且SpelException的ErrorNumber屬性為3101,請參閱SetPoint VI中的描述。
另請參閱
SetPoint VI
ArmSet範例