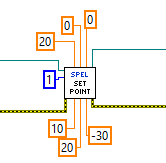
SetPoint VI
工具面板
Epson Robots 8.0 | Points
描述
設定目前機器人某個點的座標資料。
輸入
| Spel Ref In | 來自上一個Spel Ref Out的Spel參考。 |
| Error In | 來自上一個Spel節點的錯誤條件。 |
| Point Number | 選用。透過使用先前示教點的點編號(在目前機器人的控制器點記憶體中)來指定目標結束點。如果指定Point Name,則會略過Point Number。 |
| Point Name | 選用。透過使用點名稱的字串運算式指定點。如果未指定Point Name,將會使用Point Number輸入。 |
| X - W | 指定點的X、Y、Z、U、V、W座標。 |
輸出
| Spel Ref Out | 下一個要使用的VI的Spel參考輸出。 |
| Error Out | 後續Spel節點的錯誤條件輸出。 |
備註
如果發生錯誤,且SpelException的ErrorNumber屬性為3101,請參閱RCAPINet參考 - Spel類別方法的SetPoint方法中的描述。
可透過LabVIEW的屬性節點( .NET)及調用節點( .NET)來變更CurrentCulture屬性的設定。以下是SetPoint方法描述的CurrentCulture設定範例(C#)在LabVIEW的實現範例。

另請參閱
GetPoint VI, LoadPoints VI, Robot VI, SavePoints VI
SetPoint範例