Plane VI
工具面板
Epson Robots 8.0 | Robot Settings
描述
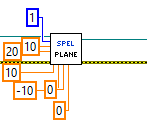
定義平面。
輸入
| Spel Ref In | 來自上一個Spel Ref Out的Spel參考。 |
| Error In | 來自上一個Spel節點的錯誤條件。 |
| Plane Number | 介於1-15的整數運算式,代表15個平面中要定義的平面。 |
| X | 平面座標系統原點X座標。 |
| Y | 平面座標系統原點Y座標。 |
| Z | 平面座標系統原點Z座標。 |
| U | 繞Z軸的平面座標系統旋轉。 |
| V | 繞Y軸的平面座標系統旋轉。 |
| W | 繞X軸的平面座標系統旋轉。 |
輸出
| Spel Ref Out | 下一個要使用的VI的Spel參考輸出。 |
| Error Out | 後續Spel節點的錯誤條件輸出。 |
備註
如果發生錯誤,且SpelException的ErrorNumber屬性為3101,請參閱SetPoint VI中的描述。
另請參閱
Box VI, InsideBox VI, InsidePlane VI, SetPoint VI
Plane範例
← Pause VI PowerHigh VI →