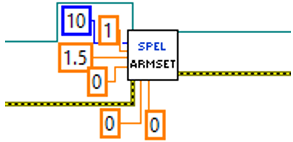
Armset VI
工具面板
Epson Robots 8.0 | Robot Settings
描述
定义辅助机器人机械臂。
输入
| Spel Ref In | 来自之前 Spel Ref Out 的 Spel 参考 |
| Error In | 来自之前 Spel 节点的错误状态 |
| ArmNumber | 整数值:1-15 的有效范围。 |
| Param1 | (对于 SCARA 机器人)肘关节中心线至新定向轴中心线的水平距离。(即新辅助机械臂的定向轴中心线所在的位置。)(对于 Cartesian 机器人)X 轴方向位置相对于 X 轴原点位置的偏移量,单位为 mm。 |
| Param2 | (对于 SCARA 机器人)正常肘中心线与正常定向轴中心线之间的成线以及新辅助机械臂肘中心线和新定向轴中心线之间的成线之间的偏移量(度)。(这 2 条线应在肘中心线处相交,所成角度即 Param2。)(对于 Cartesian 机器人)Y 轴方向位置相对于 Y 轴原点位置的偏移量,单位为 mm。 |
| Param3 | (对于 SCARA 和 Cartesian 机器人)新定向轴中心与旧定向轴中心之间的 Z 高度偏移量。(此为距离量。) |
| Param4 | (对于 SCARA 机器人)新辅助轴肩中心线至肘中心线的距离。(对于 Cartesian 机器人)这是一个虚拟参数(指定为 0)。 |
| Param5 | (对于 SCARA 和 Cartesian 机器人)新定向轴与旧定向轴之间的角度偏移量(度)。 |
输出
| Spel Ref Out | 对使用的下一个 VI 的 Spel 参考输出 |
| Error Out | 向后续 Spel 节点的错误条件输出。 |
备注
如果发生错误,并且 SpelException 的 ErrorNumber 属性为3101,请参阅 SetPoint VI 的描述。
参阅
SetPoint VI
ArmSet 示例