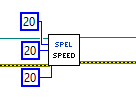
Speed VI
Tool Palette
Epson Robots 8.0 | Robot Settings
Description
Specifies the arm speed for use with the point to point instructions Go, Jump and Pulse.
Inputs
| Spel Ref In | Spel reference from a previous Spel Ref Out. |
| Error In | Error condition from a previous Spel node. |
| PointToPoint Speed | Specifies the arm speed for use with the point to point instructions Go, Jump and Pulse. |
| Depart Speed | Integer number between 1-100 representing the Z axis upward motion speed for the Jump instruction. |
| Appro Speed | Integer number between 1-100 representing the Z axis downward motion speed for the Jump instruction. |
Outputs
| Spel Ref Out | Spel reference output for next VI to use. |
| Error Out | Error condition output for subsequent Spel nodes. |
Remarks
Use Speed to set the point to point speed for the current robot. All values can be from 1 to 100%. If Depart Speed is specified, then Appro Speed must also be specified.
See Also
Accel VI, AccelS VI, SpeedS VI
Speed Example