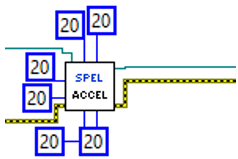
Accel VI
ツールパレット
Epson Robots 8.0 | Robot Settings
解説
カレントロボットのPTP動作の加減速度を設定します。
入力
| Spel Ref In | 前のSpel Ref OutからのSpelリファレンス |
| Error In | 前のSpelノードからのエラー状態 |
| Accel | PTP動作の加速度を表す整数値 |
| Decel | PTP動作の減速度を表す整数値 |
| Depart Accel | Jump退避加速度を表す整数値 (省略可) |
| Depart Decel | Jump退避減速度を表す整数値 (省略可) |
| Appro Accel | Jump接近加速度を表す整数値 (省略可) |
| Appro Decel | Jump接近減速度を表す整数値 (省略可) |
戻り値
| Spel Ref Out | 次に使用するVIへのSpelリファレンス出力 |
| Error Out | 後続のSpelノードへのエラー状態出力 |
コメント
カレントロボットのPTP動作の加減速度の値を設定するには、Accelを使用します。 (有効範囲: 1~100%)Depart Accelを指定する場合、残りの入力も指定する必要があります。
Accel設定は通常100が最大値となりますが、100以上の値が設定可能な機種があります。通常の使用においてはAccel設定値100が加減速度と位置決め時の振動とのバランスをとった最適な設定になっています。しかし、動作条件によっては、位置決め時の振動を小さくすることより、加減速度を上げてサイクルタイムの向上を優先したい場合があります。そのような場合には、Accel設定値に100以上の値を設定してください。ただし、動作条件によっては100以上の値を設定した場合でもサイクルタイムに変化がみられないことがあります。
参照
AccelS VI, Speed VI, SpeedS VI
Accel 使用例