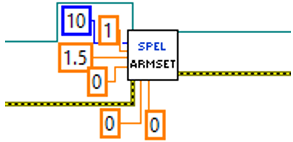
Armset VI
ツールパレット
Epson Robots 8.0 | Robot Settings
解説
増設ロボットアームを定義します。
入力
| Spel Ref In | 前のSpel Ref OutからのSpelリファレンス |
| Error In | 前のSpelノードからのエラー状態 |
| ArmNumber | 整数値 (有効範囲: 0~15) |
| Param1 | (水平多関節型の場合)肘関節の中心線から新しい方位軸の中心線までの水平距離 (増設アームの方位軸の中心線の位置)。(直角座標ロボットの場合) X軸方向の位置オフセット (単位: mm) |
| Param2 | (水平多関節型の場合)標準の肘関節の中心線と方位軸の中間にできた線と、増設アームの肘関節の中心線と方位軸の中間にできた線のオフセット (度)。これら2本の線は、肘の中心線とParam2で形成された角度で交差する必要があります。(直角座標ロボットの場合)Y軸方向の位置オフセット (単位: mm) |
| Param3 | (水平多関節型、直角座標ロボットの場合) 新しい方位軸の中心線と元の方位軸の中心線の、高さ方向のオフセット(距離) |
| Param4 | (水平多関節型の場合)増設アームの肩の中心線から肘の中心線までの距離(直角座標ロボットの場合)ダミーのパラメーター (0を指定します。) |
| Param5 | (水平多関節型、直角座標ロボットの場合) 増設アームの方位軸と既存アームの方位軸の角度のオフセット(度) |
戻り値
| Spel Ref Out | 次に使用するVIへのSpelリファレンス出力 |
| Error Out | 後続のSpelノードへのエラー状態出力 |
コメント
エラーが発生し、SpelExceptionのErrorNumberプロパティが3101である場合は、SetPoint VIのコメントを参照してください。
参照
SetPoint VI
ArmSet 使用例