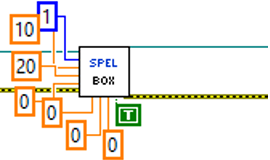
Box VI
ツールパレット
Epson Robots 8.0 | Robot Settings
解説
Box内で定義された進入検出エリアを設定します。
入力
| Spel Ref In | 前のSpel Ref OutからのSpelリファレンス |
| Error In | 前のSpelノードからのエラー状態 |
| AreaNumber | 定義するBoxの番号を示す1~15の整数値 |
| Min X | 進入検出エリアの下限位置のX座標 |
| Max X | 進入検出エリアの上限位置のX座標 |
| Min Y | 進入検出エリアの下限位置のY座標 |
| Max Y | 進入検出エリアの上限位置のY座標 |
| Min Z | 進入検出エリアの下限位置のZ座標 |
| Max Z | 進入検出エリアの上限位置のZ座標 |
| Polarity On | 対応するリモート出力使用時のリモート出力ロジックを設定します。Box内にロボットハンドが進入している場合にI/O出力をオンに設定するにはTrue、Box内にロボットハンドが進入している場合にI/O出力をオフに設定するには、Falseにします。 |
戻り値
| Spel Ref Out | 次に使用するVIへのSpelリファレンス出力 |
| Error Out | 後続のSpelノードへのエラー状態出力 |
コメント
エラーが発生し、SpelExceptionのErrorNumberプロパティが3101である場合は、SetPoint VIのコメントを参照してください。
参照
XYLim VI, SetPoint VI
Box 使用例