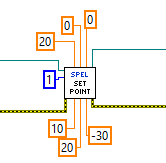
SetPoint VI
ツールパレット
Epson Robots 8.0 | Points
解説
カレントロボットのポイントの座標データを設定します。
入力
| Spel Ref In | 前のSpel Ref OutからのSpelリファレンス |
| Error In | 前のSpelノードからのエラー状態 |
| Point Number | コントローラーに保存されているカレントロボットのポイントメモリーから、以前にティーチしたポイントの番号を使用して目標終点位置を指定します。(省略可)Point Nameが指定されている場合、Point Numberは無視されます。 |
| Point Name | ポイント名の文字列式を使用してポイントを指定します。(省略可)Point Nameが指定されていない場合はPoint Number入力が使用されます。 |
| X - W | 指定したポイントのX, Y, Z, U, V, W座標 |
戻り値
| Spel Ref Out | 次に使用するVIへのSpelリファレンス出力 |
| Error Out | 後続のSpelノードへのエラー状態出力 |
コメント
エラーが発生し、SpelExceptionのErrorNumberプロパティが3101である場合は、RCAPINetリファレンス - Spelクラスメソッド のSetPoint メソッドのコメントを参照してください。
CurrentCulture プロパティの設定変更は、LabVIEWのプロパティノード( .NET)及びインボークノード( .NET)により可能です。以下は、SetPoint メソッドのコメントのCurrentCulture 設定例 (C#)の、LabVIEWでの実現例です。

参照
GetPoint VI, LoadPoints VI, Robot VI, SavePoints VI
SetPoint 使用例