JRange VI
ツールパレット
Epson Robots 8.0 | Robot Settings
解説
指定した関節の許容動作範囲をパルス単位で定義します。
入力
| Spel Ref In | 前のSpel Ref OutからのSpelリファレンス |
| Error In | 前のSpelノードからのエラー状態 |
| JointNumber | JRangeを指定する関節を表わす整数 (1~9) |
| LowerLimitPulses | 指定した関節の下限範囲のパルス値を表す整数 |
| UpperLimitPulses | 指定した関節の上限範囲のパルス値を表す整数 |
戻り値
| Spel Ref Out | 次に使用するVIへのSpelリファレンス出力 |
| Error Out | 後続のSpelノードへのエラー状態出力 |
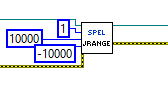
JRange 使用例