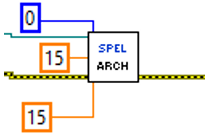
Arch VI
ツールパレット
Epson Robots 8.0 | Robot Settings
解説
Jump, Jump3命令で使用する、アーチパラメーター (水平動作を開始する前に移動するZ高さ)を設定します。
入力
| Spel Ref In | 前のSpel Ref OutからのSpelリファレンス |
| Error In | 前のSpelノードからのエラー状態 |
| Arch Number | Jump命令で、水平動作開始前の退避距離 (出発点からの垂直距離) (単位: mm) |
| Depart Dist | Jump命令で、水平動作開始前の退避距離 (出発点からの垂直距離) (単位: mm) |
| Appro Dist | Jump命令で、水平動作が完全に終了した段階での接近距離 (目的点からの垂直距離)(単位: mm) |
戻り値
| Spel Ref Out | 次に使用するVIへのSpelリファレンス出力 |
| Error Out | 後続のSpelノードへのエラー状態出力 |
コメント
エラーが発生し、SpelExceptionのErrorNumberプロパティが3101である場合は、SetPoint VIのコメントを参照してください。
参照
Jump VI, Jump3 VI, SetPoint VI
Arch 使用例